事件参数设置
事件参数也称事件定时参数,设置的合理性将影响时差定位的准确度,主要是对参与时差定位的参数设置抽取规则,包含:幅度容差、事件定义时间、事件闭锁时间、事件撞击间距等。
窗口位置
在选中任一定位视图后,点击【定位设置】,弹出界面“事件参数设置”界面。此窗口内的所有参数设置,只针对当前定位图计算时差定位点生效。
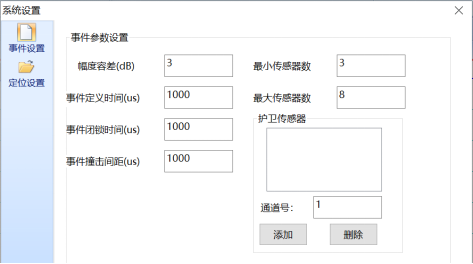
事件生成设置界面
设置规则
幅度容差:
设定幅度容差,第一撞击如果比第二撞击小,且超过容差时,事件组无效,应重新选取第一撞击。事件组中其他撞击幅度小于后续撞击,且超过容差时,此撞击应剔除。幅度容差应取一个合理的数值,该数值应取决于传感器灵敏度测试时最大传感器灵敏度和最小灵敏度的差值,幅度容差应比该差值稍大一些,如阵列内所有传感器灵敏度差值最大为4db,则幅度容差设置要大于4db,但也不应过大,否则会产生伪事件过多的情况,直接输入即可;
事件定义时间:
由第一撞击开始计时,当达到设定的时长,即使没有收到所有相关通道撞击,本事件组也将强行结束;可以理解为在多长时间内传感器定位分组接收到的所有信号,可以初步被认为是同一个声发射源发出的,因此在设定该数值时就考虑设定定位探头组的临界情况,如多边形定位探头排列,选取两传感器最大间距,即是定位事件所能生成的边界,除以声速,就是一个定位事件的最大定义值,在适当设定误差范围,如20%,即可按照此原则设定事件定义时间。
事件闭所时间:
自上一个事件的最后一个撞击开始计时,在设定的时长内,收到的任何撞击,均不作为下一事件组的第一撞击。如果使用3探头平面定位算法,则锁闭时间可以设定为0,如使用多探头定位算法,可设定该时间与撞击定义时间(HDT)相同。
事件撞击间距:
由第一撞击开始计时,在设定时长结束前,收到该阵列内其它通道撞击数据,则事件组继续执行,如未收到其它任何通道撞击,则事件组强行截止,重新选取第一撞击。设置时参考同阵列中相邻两个传感器最大间距,除以声速,就是一个定位事件的最大定义值,在适当设定误差范围,如20%,即可按照此原则设定事件撞击间距。
举例
为便于理解,我们举例矩形传感器布置阵列做说明:S1~S4为传感器,a、b、d为距离值,拟定声速为S,采用4个传感器共同参与定位计算;

传感器布置阵列示意图
幅度容差:
计算的到传感器S1~S4灵敏度最大值与最小值之差,直接输入即可;
事件定义事件:
同阵列中任意两个传感器最大间距,矩形阵列为对角线长度d,则需要输入的数值为 1.2d/S;
事件闭所时间:
一般等同于硬件设置里面的“撞击定义时间HDT”
事件撞击间距:
同阵列中相邻两个传感器最大间距,矩形阵列为边长b,则需要输入的数值为 1.2b/S;
